|
Endoscopia virtuale - nota tecnica
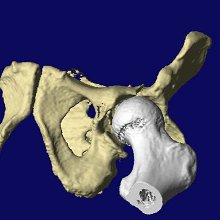
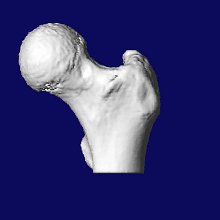
L'applicazione di tecniche di ricostruzione tridimensionali ai dati volumetrici provenienti da sottili scansioni assiali ha iniziato ad interessare la comunità medica quasi in concomitanza con l'esordio della tomografia computerizzata (TC) nel 1979. La possibilità di collocare strutture anatomiche nello spazio tridimensionale era di forte interesse per chirurghi e ortopedici. Purtroppo le limitazioni erano tante: tempi di acquisizioni lunghi che comportavano artefatti dovuti a movimento del paziente, scarsi risultati in termini di risoluzione spaziale e di contrasto; tempi di elaborazione dei dati 3D lunghissimi; algoritmi di elaborazione dati inadeguati. L'evoluzione tecnologica dei sistemi TC in termini di velocità di acquisizione ed elaborazione, e contemporaneamente, la disponibilità di sistemi di elaborazione sempre più veloci e potenti, uniti a nuove tecniche di ricostruzione, con nuovi algoritmi per la post-elaborazione hanno consentito una diffusione capillare dei programmi 3D. Oggi molti TC spirale e multislice sono equipaggiati con programmi di ricostruzione bi- e tridimensionali, tra cui l'endoscopia virtuale. Questa nota vuole introdurre con alcuni cenni tecnici questa tecnica di ricostruzione, e le nuove funzionalità introdotte in questi programmi che migliorano l'efficacia e la velocità di esecuzione. Infine saranno trattati i nuovi sistemi TC Multislice o Multicanale e i vantaggi dell'utilizzo di questa nuova tecnologia relativamente alla velocità ed alla risoluzione spaziale ottenibili per l'esecuzione di esami utili per l'endoscopia virtuale. Principi tecnici di 3D Surface shading e Volume rendering. I moderni TC e RM producono un set di immagini di sezioni. Quando questi strati individuali sono messe insieme viene creato un set di dati volumetrici in scala di grigi. I voxel (elementi di volume) sono gli elementi base dei dati di volume, allo stesso modo dei pixel che sono gli elementi dell'immagine. Le tecniche di visualizzazione di volume mostrano il volume di dati interamente, producendo una singola immagine proiettata. Il volume di dati si può vedere come un campionamento discreto di un campo continuo di densità, che può essere ricostruito attraverso funzioni di interpolazione. Selezionando solo uno specifico valore di densità è possibile definire un isosuperficie in questo campo continuo. Questo è il metodo base utilizzato per selezionare i dati visibili dal volume. In certe condizioni, un isosuperficie potrebbe non essere sufficiente, per esempio quando certe strutture oscurano la visuale. In queste situazioni, la selezione delle isosuperfici può essere limitata alle strutture di interesse, rendendo le strutture che originalmente ostruivano la visione invisibili. Questo si fa attraverso un processo chiamato "segmentazione" ed è utilizzato nella tecnica di surface shading, dove si ricostruiscono soltanto i primi voxel, quelli di superficie, appunto, incontrati. Lo svantaggio di questa tecnica è che sia la definizione della soglia che la modifica (editing) dipendono in massima parte dall'utente. Le dimensioni delle strutture dipendono in gran parte dai valori di soglia usati per l'estrazione della superficie, e dall'algoritmo di definizione del contorno utilizzato.
Con il volume rendering si seleziona un punto di vista e si inviano raggi immaginari attraverso il data set (ray-tracing). Questa volta tuttavia sono tenuti in considerazione tutti i voxel. Il fattore di pesatura dei vari valori Hounsfield determina l'aspetto della proiezione. Ai voxel che appartengono parzialmente a diversi tessuti possono essere assegnati fattori di pesatura intermedia basandosi sui valori di intensità nel volume. Questo evita alcuni dei problemi incontrati con il rendering di superficie. Un altro dei vantaggi del rendering di volume è che è possibile scegliere l'opacità del tessuto (24). Inoltre, il metodo di ray-tracing tiene in considerazione non solo la luce assorbita, ma anche quella riflessa, con un'eccellente qualità di immagine risultante, e comprende anche la formazione di "ombre", contribuendo all'aspetto realistico dell'immagine ricostruita.
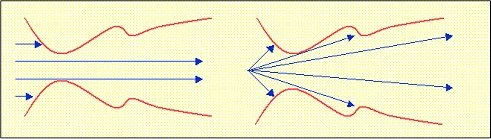
L'endoscopia virtuale. L'endoscopia virtuale visualizza superfici interne di strutture presenti in dati volumetrici come immagini tridimensionali. Per simulare l'endoscopia virtuale reale si possono utilizzare sia il surface shading sia il volume rendering, con relativi vantaggi e svantaggi. Poiché la navigazione in strutture interne diventa rapidamente una procedura complessa, spesso è possibile usare un percorso predefinito attraverso la struttura. Questo percorso può essere usato sia per investigare le strutture interne, sia per generare un'animazione lungo la traccia. Il surface shading conferisce all'immagine un aspetto molto simile a quello di un'endoscopia reale: questo è essenziale nell'endoscopia virtuale, che mostra lievi cambiamenti nella superficie, non visibili altrimenti. La sorgente di luce si posiziona usualmente nel punto di vista dell'osservatore, cosa che assicura una soddisfacente illuminazione di tutte le superfici visibili. In endoscopia virtuale si utilizzano solitamente fattori molto grandi di zoom (ingrandimento). Di conseguenza, voxel individuali diventano facilmente apprezzabili, soprattutto se si usa il surface rendering. Con fattori di zoom molto grandi, questi voxel (piatti) si evidenziano facilmente alla luce nelle immagini. Poiché il volume rendering genera immagini dal volume di dati stesso, permette un rendering a più alta risoluzione spaziale quando le immagini sono zoomate. Perciò, le immagini a volume rendering mostrano dettagli non presenti in quelle a resa superficiale. Così, sebbene il surface rendering sia capace di fornire immagini in tempo reale, il volume rendering è la tecnica di elezione per l'endoscopia virtuale. Per visualizzare l'interno di strutture tubulari, è necessario selezionare le superfici visibili. Normalmente è sufficiente una semplice soglia e ciò che si ottiene è una visualizzazione della isosuperficie. Talvolta è però necessario un processo di segmentazione per rimuovere strutture oscuranti. Per l'endoscopia virtuale non è molto utile la proiezione parallela, in quanto consentirebbe la visualizzazione di solo una piccola parte delle superfici delle pareti, e sarebbe molto arduo rilevare la profondità in tali immagini. Poiché le diramazioni sarebbero difficilmente rilevabili, verrebbero perse facilmente. La proiezione prospettica mostra più della struttura delle superfici tubulari della proiezione parallela. Inoltre la distorsione prospettica infonde buoni suggerimenti di profondità. Questo fenomeno è illustrato in figura. Con la proiezione parallela le strutture poste di fronte bloccano la visualizzazione delle strutture poste dietro.
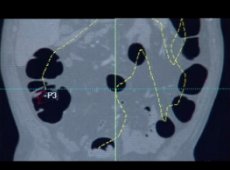
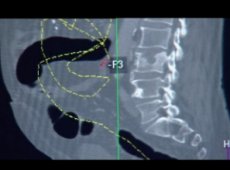
Navigare attraverso le strutture interne è spesso un problema, specialmente quando queste strutture sono fortemente curve, come ad esempio, nel colon.. Allo stesso tempo una soluzione semplice a questo problema è usare una guida al percorso al fine di ottenere una facile navigazione. Le proprietà del percorso devono essere le seguenti: È possibile specificare il percorso in maniera manuale definendo dei punti chiave. Le posizioni intermedie sono poi automaticamente determinate adattando una curva che passa attraverso questi punti definiti manualmente. Questa tecnica è ben conosciuta nell'animazione computerizzata. Ma definire punti chiave soddisfacenti è spesso difficile e impiega molto tempo, ad esempio, nel caso di colonscopia virtuale circa 30-40 minuti per percorso. Un'altra possibilità è quella di utilizzare un algoritmo di generazione del percorso computer-assistito, come l'opzione AutoPath del programma Endo3D per Philips EasyVision, dove l'operatore definisce il punto di partenza ed il programma traccia automaticamente il percorso al centro della struttura in esame. Con questo metodo, i tempi si riducono notevolmente (2-3 minuti per percorso). Successivamente si può generare un'animazione, creando una serie di immagini lungo il percorso a distanze piccole. L'animazione si può salvare per consultazione successiva.
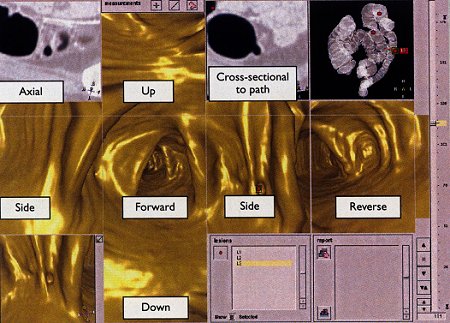
Il tempo occorrente al radiologo per valutare poi le immagini risultanti è comunque molto lungo, in quanto è necessario consultare immagini assiali e MPR (ricostruzioni multiplanari) nei piani coronali e sagittali insieme all'endoscopia virtuale creata lungo il percorso. In particolare, per poter effettuare una corretta valutazione della struttura in esame, è indispensabile navigare in avanti lungo il percorso, e poi procedere a ritroso - questo per poter vedere anche le parti di pareti "alle spalle" dell'endoscopio virtuale. Nel caso del colon, occorre inoltre valutare la parete e i plichi di mucosa a 360°, che non sempre sono identificabili con la sola navigazione in entrambi i sensi. Il tempo necessario per l'effettuazione della valutazione come descritta, da parte di un radiologo esperto, si aggira intorno a 45 minuti per esame. Per questo motivo Philips ha sviluppato una nuova opzione denominata "Endo 3D Unfolded" che presenta la superficie panoramica completa della parete del colon su un unico piano. Tramite una serie di cubi "aperti", le sei superfici (sinistra-destra-sopra-sotto-avanti-dietro) dell'area in esame in tutti i punti della navigazione tridimensionale sono disponibili in un'unica immagine piana. Endo 3D Unfolded consente una notevole riduzione del tempo di valutazione, da 45 minuti senza Unfolded 15 minuti con quest'opzione. Il programma consente inoltre di contrassegnare eventuali lesioni, che sono poi riportate nelle immagini di riferimento, in quanto tutte le immagini sono correlate geometricamente.
Il Volume Rendering è dunque la tecnica di resa tridimensionale di elezione per l'endoscopia virtuale, poiché mostra dettagli non presenti in immagini a resa superficiale. Una guida nella scelta del percorso semplifica considerevolmente la navigazione nelle strutture interne e fornisce non solo un'ottimale posizione nel volume di dati, ma anche un'utile direzione di vista. Sistemi TC Multislice o Multicanale. L'idea della TC multislice nasce nel 1992 per opera della Elscint che per prima pensò ad una macchina in grado di generare due immagini in una singola rotazione del complesso radiogeno. Verso la fine del 1998, molte aziende produttrici lanciarono la generazione successiva di TC multislice. Queste unità hanno quattro sistemi di acquisizione dati connessi ad un array di rivelatori, per fornire una scansione quad-section, ovvero a quattro sezioni per rotazione, che aumenta la velocità di raccolta dei dati di un fattore quattro rispetto ai TC spirali a singola elica. Inoltre alcune di queste apparecchiature dispongono di velocità di rotazione massima di due rivoluzioni al secondo, due volte più veloce della maggior parte dei TC spirali a singola elica con tempo minimo di scansione di 1s su 360°. Questi due miglioramenti messi insieme accrescono la velocità di scansione di un fattore otto rispetto ai TC spirali a singola elica. I benefici di un TC quad-section rispetto ad un sistema TC spirale a singolo strato sono significativi. L'esame può essere fatto con spessori di strato più sottili, aumentando la risoluzione spaziale lungo l'asse longitudinale del paziente. La scansione può essere fatta più velocemente, portando a una risoluzione temporale migliore e ad una riduzione degli artefatti da movimento. Il mezzo di contrasto intravenoso può essere iniettato ad un rate più alto, consentendo l'aumento dell'enhancement di contrasto nelle immagini. Questi fattori insieme portano ad aumentare le risoluzioni spaziale, temporale e di contrasto nelle immagini, accrescendo significativamente l'accuratezza diagnostica dell'esame. Successivamente sono stati introdotti sistemi a 8, 10 e 16 canali di acquisizione contemporanei. L'aumento di velocità di scansione in TC multislice può essere utilizzato esclusivamente per ridurre il tempo di scansione. Oppure, mantenendo uguale il tempo totale di scansione, si possono utilizzare spessori di strato più piccoli, portando ad un aumento della risoluzione spaziale. I vantaggi di un TC multislice sono i seguenti: - Aumento di risoluzione temporale: una scansione più veloce porta a meno artefatti dovuti a movimento volontario o involontario (es. peristalsi intestinale, respirazione). I tempi di apnea sono ridotti. - Aumento di risoluzione spaziale lungo l'asse z: sezioni più sottili portano ad un miglioramento della risoluzione longitudinale lungo l'asse z, riducendo gli artefatti da volume parziale e accrescendo l'accuratezza diagnostica. La figura sotto dimostra il beneficio in risoluzione spaziale lungo l'asse z a parità di tempo di acquisizione.
- Diminuzione del rumore nelle immagini: per sistemi multislice, in una sola rotazione si ricopre un volume più cospicuo del paziente; così, per studi ad ampia copertura, la corrente del tubo può essere aumentata. Una corrente più alta comporta una riduzione del rumore e un miglioramento della qualità delle immagini, che è critico per studi a spessori sottili, a lunga copertura, in pazienti di grandi dimensioni. - Copertura anatomica più lunga: un grande vantaggio della TC multislice rispetto a quelle a singola elica è la possibilità di coprire volumi anatomici più lunghi.
- Aumento della concentrazione del mezzo di contrasto intravenoso: poiché la scansione avviene più rapidamente, il mezzo di contrasto può essere somministrato a rate più elevati, aumentandone la concentrazione nelle arterie, nelle vene, e in situazioni patologiche ricche in flusso sanguigno (aneurismi, tumori ipervascolarizzati, sanguinamento attivo). La separazione tra le fasi contrastografiche (arteriosa e venosa) migliora. - Uso efficiente del tubo: una scansione più corta porta a una riduzione del riscaldamento del tubo, decrescendo o eliminando i ritardi tra due scansioni. Si producono più immagini durante la vita di un tubo, riducendo i costi operativi. Abbiamo visto che uno dei vantaggi della TC Multislice è la possibilità di lavorare a strato sottile senza compromettere la velocità di esecuzione dell'esame. L'incremento del numero di canali di acquisizione (8, 10, 16) va a pari passo con la progressiva riduzione dello spessore degli strati acquisibili contemporaneamente (attualmente intorno a 0,8mm di spessore effettivo per sistemi a 16 canali). Il risultato dell'utilizzo di spessori così sottili è il voxel isotropico, cioè un voxel che ha la medesima dimensione lungo i tre assi x,y,z. Pertanto possiamo adesso utilizzare vantaggiosamente la ricostruzione multiplanare (MPR), tecnica ampiamente usata già da molti anni, ma ora i piani ricostruiti hanno effettivamente la stessa risoluzione del piano di acquisizione.
E' inoltre possibile ricostruire strati intercalati tra le posizioni di lettino originali, migliorando ulteriormente la risoluzione lungo l'asse longitudinale del paziente. Inoltre la TC Multislice consente di "sommare" strati sottili per ottenere strati più spessi, con conseguente riduzione del rumore di fondo e di artefatti, viceversa, è anche possibile la retro-ricostruzione da strati più spessi a strati più sottili. Vantaggi derivanti dall'utilizzo della TC Multislice per applicazioni Endo3D Come noto, i fattori importanti per la buona riuscita di un esame per Endoscopia Virtuale sono: I sistemi TC Multislice, grazie ai tempi di acquisizione ridotti, consentono un maggior comfort al paziente dovuti a tempi di esami più brevi. Il paziente dovrà mantenere l'apnea per un tempo minore, e di conseguenza la qualità dell'esame migliora. La possibilità di utilizzare spessori di strato molto sottili senza compromettere la brevità dell'esame garantisce un'elevata risoluzione spaziale anche nell'asse Z per ridurre l'effetto di volume parziale. Chiaramente, l'utente deve anche porre particolare attenzione alla dose assorbita dal paziente nell'effettuazione di questo tipo di esame. I nuovi sistemi TC sono dotati di una serie di accorgimenti costruttivi, come, ad esempio, rivelatori allo stato solido ad elevata efficienza dosimetrica, filtraggio al tubo radiogeno per eliminare radiazione molli che non contribuiscono a formare l'immagine, per limitare la dose al paziente. Esistono anche nuovi programmi che impostano i parametri di acquisizione in funzione dello spessore e la densità dell'oggetto in esame, programmi per la modulazione della dose in tempo reale, e la visualizzazione della dose CTDI calcolata in base ai parametri impostati che aiutano l'utente nell'esecuzione dell'esame. Conclusioni Il Volume Rendering è dunque la tecnica di resa tridimensionale di elezione per l'endoscopia virtuale, poiché mostra dettagli non presenti in immagini a resa superficiale. Una guida nella scelta del percorso semplifica considerevolmente la navigazione nelle strutture interne e fornisce non solo un'ottimale posizione nel volume di dati, ma anche un'utile direzione di vista. In esami TC dove si ricorre all'endoscopia virtuale è importante avere voxel il più possibile isotropici, ciò permette di poter gestire le immagini senza creare artefatti da posizionamento rispetto all'asse longitudinale, e consente un'elevata risoluzione anche su piani non assiali. Questo tipo di esigenza trova una risposta nella TC multislice, che può usufruire di tempi d'esame ridotti con la possibilità di acquisire un volume di dati nello stesso tempo con strati molto più sottili. |
||||||||||||||||||||||||||||||||||||||||||||||||||||